ウインチサーボの選定について
なんでRMGのウインチサーボを使わないんですか?
との問い合わせがあったので記事にします。
それと3Dプリンターのトラブルについてたくさんの励ましを頂き本当にありがとうございます。
ここでお礼をさせていただきます。
個別の返信についてはご容赦ください。
(気持ちが沈んできてしまいそうで・・・。)
これから作っていくぞ~!というところでこのトラブルは気持ち的にもかなり落ち込みました。
でもブログのネタが増えて同じようなトラブルを経験した人の参考になればと思うことにしました。
このトラブルも誰かの役に立つと思いなおして何とか今日も続けられています。
では気持ちを入れ替えて・・・。
RMGのウインチサーボと今回選定のウインチサーボ
RMGのウインチサーボは今回選定の物に比べて低価格でスピードも速くトルクも十分あります。

ですがポテンショメーターは完全防水をうたっていますがモーター、減速用のギア、モーターの配線などがむき出しで防水とは言い難い・・・。
サイズも今回選定のARS808と比べかなり大きく形も複雑です。
ARS808の購入ページ

ARS808とARS808Rは同一サイズ同一取り合いなので簡単に入れ替えが可能です。

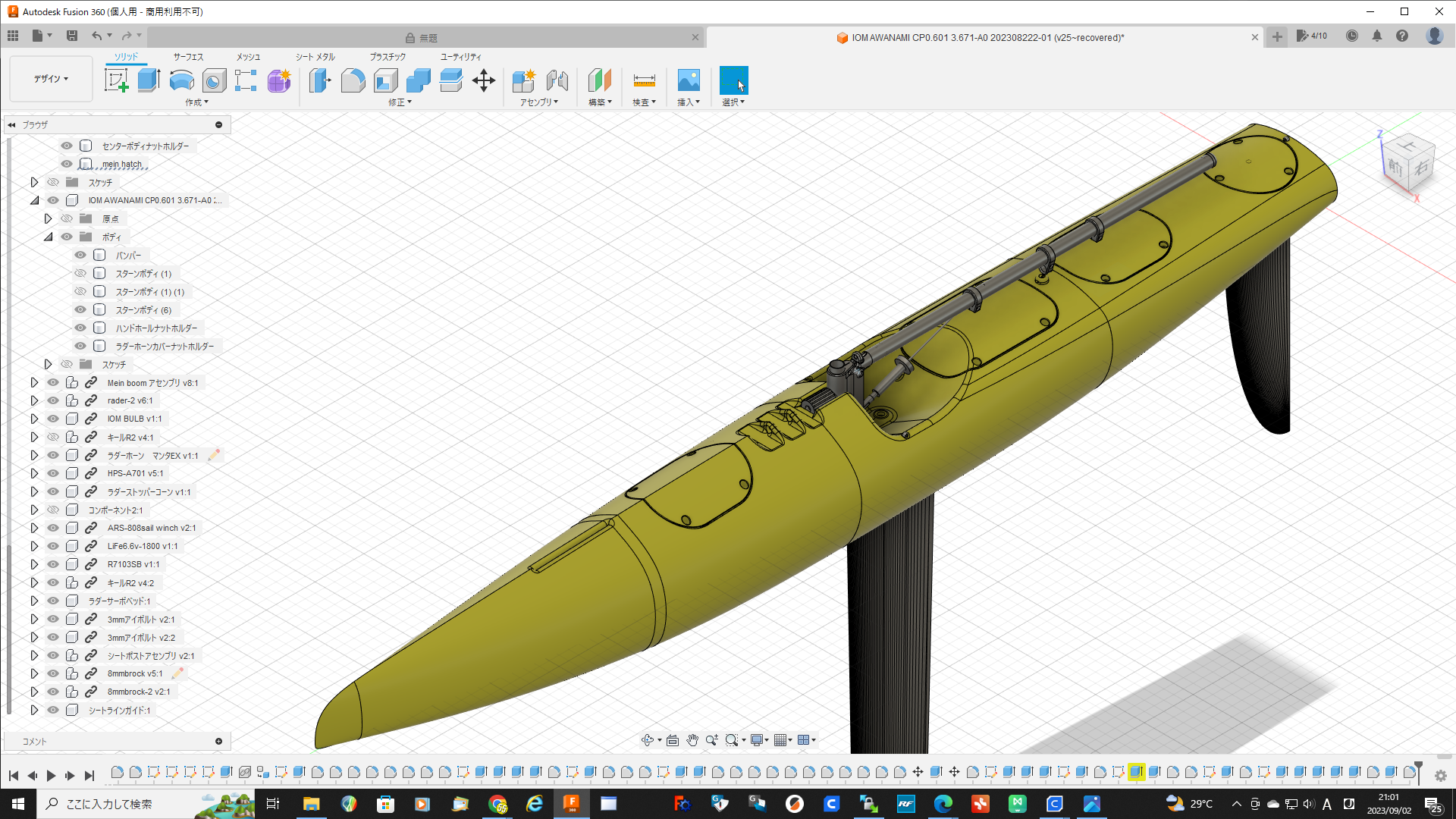
今回設計のIOM AWANAMIではキールケースの後ろ側にウインチサーボを搭載します。
なのでRMGのウインチサーボはスペースに余裕が無く物理的に搭載は不可能です。
そもそも普通のIOMと比べてビーム(ハルの横幅)が狭くデッキの高さが低いです。
基本的に風の力をセールで受けてキールでバランスをとっているのでその距離が短い方が有利かつ効率が良くなります。
なので限界までハルの後半の高さを低く設計しセールの取り付け位置を下げています。
クローズホールドでマストの傾きが約30°まではブームが水をたたかないようにかなりせめて検討しています。
ウインチサーボの浸水は?
そのためハル内部に水が入った場合にウインチサーボが浸水してしまう可能性がかなり高くなる、とは想像しています。
ウインチサーボの底とハルの底とのクリアランスは1mmを切っています( ´艸`)。
ここはほぼ限界設計です。
職業柄、詰め込み設計はかなり鍛えられました。
なのでこの程度はまだまだ軽い部類なので特に何という事は無いというのもあるかもしれません。
自分の場合はという事で( ^ω^)・・・。
もっと厳しい設計をしているところは世の中に無数にあると思います。
ハル後半のデッキの高さは今回採用のARS808Rのウインチサーボにノーマルの40mmドラムをセットした高さを基準にして決定しているので当然と言えば当然なんですが・・・。
もしRMGのセールウインチの搭載を検討するならマストの位置の前側に搭載の必要があり大幅?な設計変更が必要になるとは思います。
とはいっても出来ることではあるので必要になったら設計変更しているかもしれないんですが・・・。
そのためのバウのハンドホールでもあるのでハル自体は作り直さないで対応は出来るとは思っています。
ここはやってみないと・・・。
選定時の検討事項
選定時の検討事項として
必要なシートトラベルは?
どのくらい余裕が必要?
ここを押さえておかなくてはならないです。
ウインチサーボで最終的に必要なトラベルの最小必要長さは311mm
調整幅も入れれば350mm程度は確保したいところです。
参考
レスターギルバートさんのホームページのシーティングのページ

今回採用のウインチサーボARS808は
6回転でドラムの径32mmなので602.88mm
十分なトラベルです。
必然的にそのトラベル調整のために対応するプロポと受信機は必須となります。
エンドポイントを調整できる中級のコンピュータプロポであれば特に問題はないかとも思います。
6V時1.95turn/secなので必要なフルストローク311mmを繰り出すには
1回転で繰り出す長さ32*π=100.48
311/100.48=3.095回転
必要な回転数は約半分。
全開までのスピードは。
3.095/1.95=1.587secで全開です。
これおそいのかな?。
ARS808Rは2.5 turn/secなので
3.095/2.5=1.238 secで0.349 sec早い
でもRMGのセールウインチよりは遅いです。
でも防水仕様(IP68防水等級)でコンパクトです。
デッキが低くてRMGウインチは入らないし・・・。
マスト前にウインチを入れることも考えたんですが・・・。
重い物は出来るだけ前側には配置したくなかったというのもあります。
まあそういう仕様にしてしまいました。
まあ6V時の数値なので8.4Vまで上げれば3.4回転/秒まであげられるんですが・・・。
双葉の受信機はたしか7.6vまでしか対応していないはずなので上げられてもそこまで
自分は今回6.6VのLife を使うので1割ぐらいは早いのかな?
多分全開までR タイプを使えば1秒ちょっとというイメージでいいんじゃないかと・・・。
その代わりハイトルクなのでそこはトレードオフです。
で今のままなら1.5秒ちょっとです。6.6Vのバッテリーを使うので実際はもう少し早いはずです。
まあ今はRタイプの在庫が無いんで仕方が無い・・・。
購入出来たら入れ替えの予定です。
更なるスピードUPを求めるなら。
もっとスピードアップを狙うなら径の大きなドラムを利用すればいいとも思います。
その場合セルフリターンのドラムが無いので何らかの対応は必要かと思います。
途中にバネやゴムを入れてシートが絡まないような工夫をすればいいとも思います。
そういった船はいくらでもあると思うのでそれらを参考にしてみてください。
DFのようにゴムで終端を引っ張ってもいいとは思います。
基本的にコンパクトで防水の物で必要十分なトルクのウインチサーボを選んだという事です。
でもしスピードが足りなければRタイプに変更します。
それでも足りなければドラムの径をUPする方向で考えています。
その時は多分ドラムの径を40mmのノーマルのドラムにUPしてしまいます。
セルフテンションドラムではないので各セールへの分岐位置の後ろ側にバネなどを入れてやればテンションは維持できるのでそれほど特別な改造も必要ないです。
その場合はシートのラインがずれてしまうので(ドラムの場所で4mm)基本的にはやりたくないなとは思っています。
まあ試作艇なんでそこはそのままやってしまうかもですが・・・。
どうでしょう。
回答になっているでしょうか・・・。
記事
R0.0 新規作成 2023.09.08