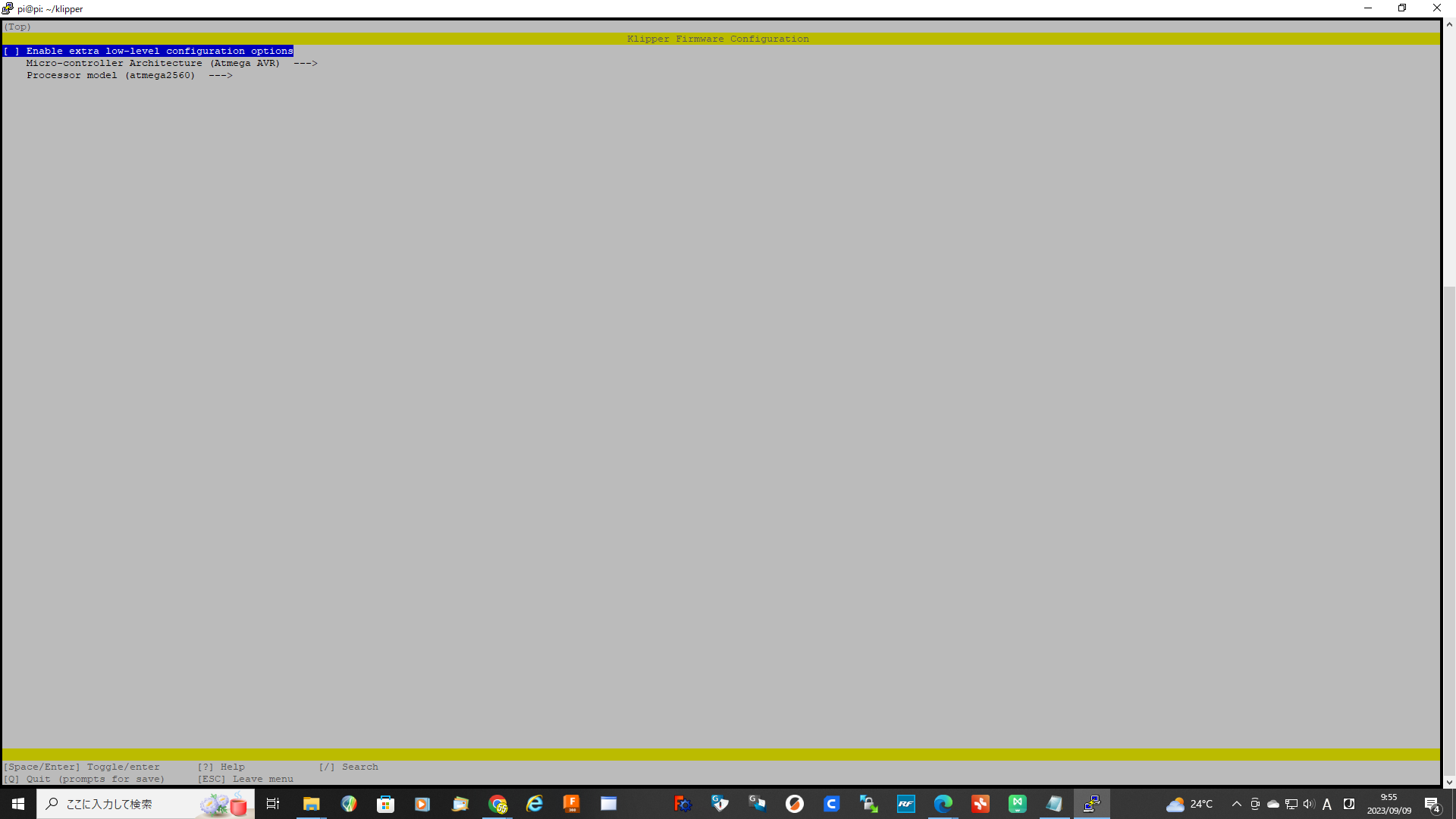
前回はファームウェアのフラッシュが終わりました。
今回はprinter.cfgの修正です
ソフトウェア構成
参考
ソフトウェア構成 |ヴォロンドキュメンテーション (vorondesign.com)

Voron-2/ファームウェア/klipper_configurations at Voron2.4 ·ボロンデザイン/ボロン-2 ·ティッカー (github.com)

を開きRAWボタンを押す
をダウンロード。
ファイル名を
printer.cfg
に変更する。
printer.cfgの修正。(パス)
メモ帳で開く。
[mcu]セクションで{REPLACE WITH YOUR SERIAL}を
usb-Klipper_stm32f446xx_0E000E000950535556323420-if00
に入れ替え
Win SCPで
/home/pi/printer_data/config
にprinter.cfgをコピーする。
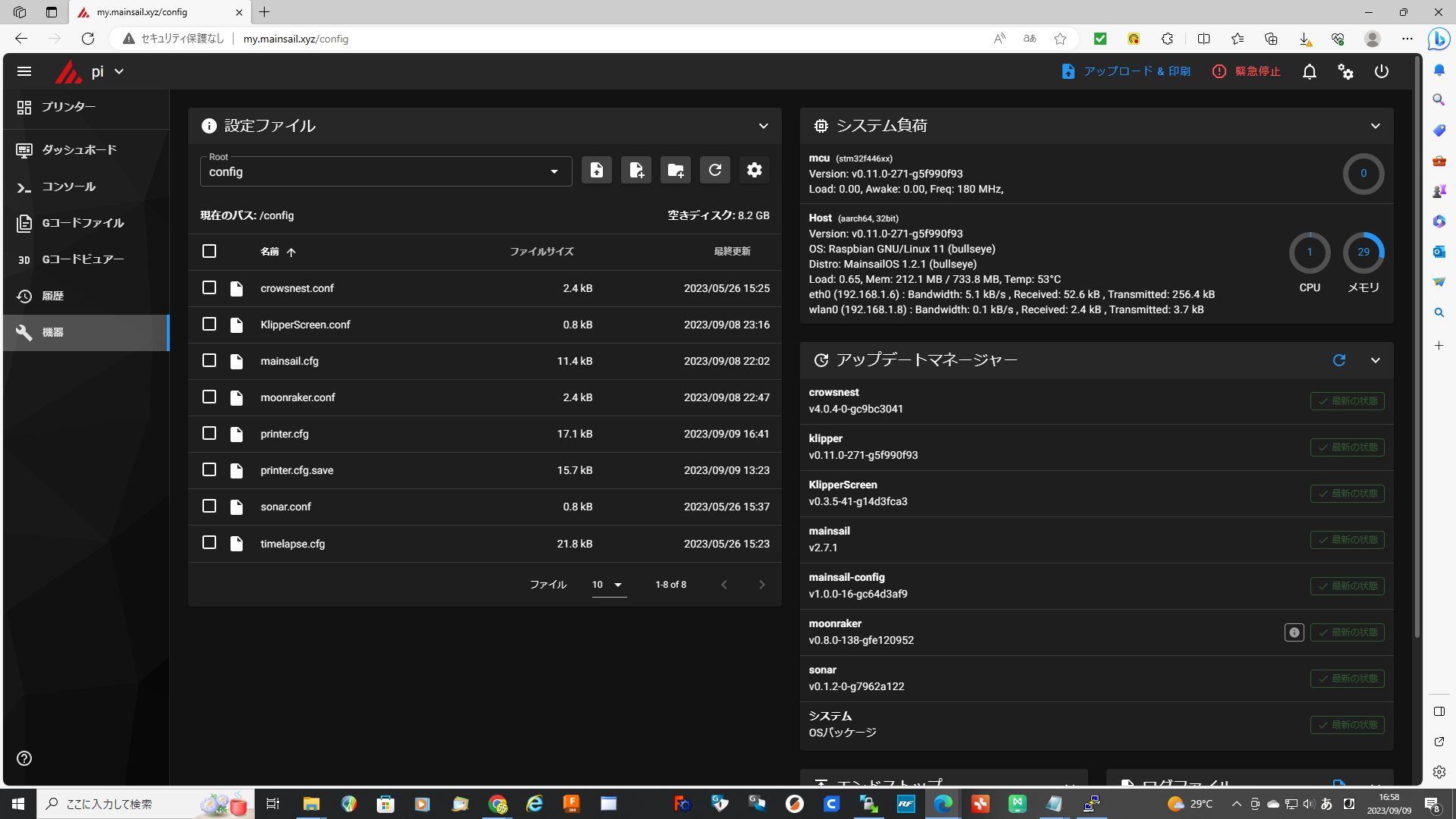
ブラウザーのメインセールのMACHINEでprinter.cfg
が表示されていることを確認する。
エラー画面のRESTARTを押す。
エラー内容が
Option ‘sensor_type’ in section ‘heater_bed’ must be specified Once the underlying issue is corrected, use the “RESTART” command to reload the config and restart the host software. Printer is halted
に変わる。
printer.cfgの修正。
PuTTYで
nano ~/printer_data/config/printer.cfg
で変更の必要な項目を確認出来る。
Win SCPで
/home/pi/printer_data/config
でprinter.cfgを開く。
プリンターセクション~を以下に修正。
[printer]
kinematics: corexy
max_velocity: 350
max_accel: 3000 #Max 4000
max_z_velocity: 50 #Max 15 for 12V TMC Drivers, can increase for 24V
max_z_accel: 350
square_corner_velocity: 10.0
X/Y Stepper Settings
[stepper_x]
dir_pin: PF12
full_steps_per_rotation:400 #set to 400 for 0.9 degree
stepperposition_endstop: 355
position_max: 355
[stepper_y]
dir_pin: PG1
full_steps_per_rotation:400 #set to 400 for 0.9 degree stepper
position_endstop: 355
position_max: 355
Z Stepper Settings
[stepper_z]
dir_pin: PG3
position_max: 335
[tmc2209 stepper_z]
stealthchop_threshold: 999999
[stepper_z1]
dir_pin: !PC1
[tmc2209 stepper_z1]
stealthchop_threshold: 999999
[stepper_z2]
dir_pin: PF10
[tmc2209 stepper_z2]
stealthchop_threshold:
[stepper_z3]
dir_pin: !PF0
[tmc2209 stepper_z3]
stealthchop_threshold: 999999
Extruder
[extruder]
dir_pin: !PE3
rotation_distance: 22.3387668 #Bondtech 5mm Drive Gears
gear_ratio: 50:17 #BMG Gear Ratio
sensor_type: ATC Semitec 104NT-4-R025H42G
min_temp: 0
#control = pid
#pid_kp = 26.213
#pid_ki = 1.304
#pid_kd = 131.721
Bed Heater
[heater_bed]
heater_pin: PA1
sensor_type: Generic 3950
max_power: 1
#control: pid
#pid_kp: 58.437
#pid_ki: 2.347
#pid_kd: 363.769
[verify_heater heater_bed]
max_error: 20000 # (in degC*sec : error score) every second, if temp is beyond ‘hysterisis’ below, the counter will add up the temperature error to the error score untill the ‘max_error’ is reached , resets when temp is inside ‘hysterisis’
check_gain_time: 300 # (in seconds) while initial heating, will make sure that every time ‘check_gain_time’ delay has passed, temperature has went up by ‘heating_gain’ below
hysteresis: 5 # (in degrees c)
heating_gain: 1 # (in degrees c)
Probe
pin: PG15
samples: 5
LED Control
[output_pin caselight]
pin: PD15
pwm:true
shutdown_value: 0
value:0
cycle_time: 0.01
以下を追加
[include mainsail.cfg]#
Additional Sensors
#
[thermistor CMFB103F3950FANT]
temperature1: 0.0
resistance1: 32116.0
temperature2: 40.0
resistance2: 5309.0
temperature3: 80.0
resistance3: 1228.0
[temperature_sensor chamber_temp]
##Chamber Temperature – T1
sensor_type: CMFB103F3950FANT
sensor_pin: PF5
min_temp: 0
max_temp: 100
gcode_id: chamber_th
Homing and Gantry Adjustment Routines
[safe_z_home]
home_xy_position:235,355
gantry_corners:
-60,-10
410,420
##Probe points
points:
50,25
50,275
300,275
300,25
Displays
[display]
lcd_type: uc1701
cs_pin: EXP1_3
a0_pin: EXP1_4
rst_pin: EXP1_5
encoder_pins: ^EXP2_5, ^EXP2_3
click_pin: ^!EXP1_2
contrast: 63
spi_software_miso_pin: EXP2_1
spi_software_mosi_pin: EXP2_6
spi_software_sclk_pin: EXP2_2
[neopixel btt_mini12864]
pin: EXP1_6
chain_count: 3
initial_RED: 0.1
initial_GREEN: 0.5
initial_BLUE: 0.0
color_order: RGB
[delayed_gcode setdisplayneopixel]
initial_duration: 1
gcode:
SET_LED LED=btt_mini12864 RED=1 GREEN=1 BLUE=1 INDEX=1 TRANSMIT=0
SET_LED LED=btt_mini12864 RED=1 GREEN=0 BLUE=0 INDEX=2 TRANSMIT=0
SET_LED LED=btt_mini12864 RED=1 GREEN=0 BLUE=0 INDEX=3
*# <———————- SAVE_CONFIG ———————->
*# DO NOT EDIT THIS BLOCK OR BELOW. The contents are auto-generated.
*
*# [extruder]
*# control = pid
*# pid_kp = 21.795
*# pid_ki = 1.358
*# pid_kd = 87.454
*
*# [heater_bed]
*# control = pid
*# pid_kp = 75.222
*# pid_ki = 0.795
*# pid_kd = 1779.936
保存 Xで閉じる。
お疲れさまでした。
これで立ち上がれば間違いはないはず( ^ω^)・・・。
ブラウザーのメインセールでリセットしてください。
たち上がりました。
エラーが出なければ修正は完了です。
エラーが出た場合はメッセージを確認してその内容を確認して修正します。
PID 調整、ストローク、モーターの方向等は以前の構成ファイルからコピペしたのでそのまま使えます。
電源を切って外しておいたヒーターの配線を取付して裏ブタを取り付けておしまいです。
記事
R0.0 新規作成 2023.09.12